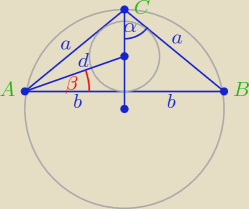
| 90 − α | 1 | |||
β = | = 45 − | α | ||
| 2 | 2 |
| 1 | b | 1 | ||||
cos(45 − | α) = | ⇒ b = d * cos(45 − | α) | |||
| 2 | d | 2 |
| b | b |
| |||||||||||||
sinα = | ⇒ a = | ⇒ a = | |||||||||||||
| a | sinα | sinα |
| 2b | b |
| ||||||||||||
= 2R ⇒ R = | ⇒ R = | |||||||||||||
| sin2α | sin2α | sin2α |
| 1 | 1 |
| |||||||||||||
P = | a2sin2α = | * | * 2sinαcosα = | ||||||||||||
| 2 | 2 | sin2α |
| 1 | ||
= d2 * cos2(45 − | α) * ctgα | |
| 2 |
| 1 | ||||||||||||
R = | , P = d2 * cos2(45 − | α) * ctgα | |||||||||||
| sin2α | 2 |