| S | ||
r=√ | ||
| π |
| S | ||
a=2r=2√ | ||
| π |
| S | S | |||
P=2√ | * 2√ | *sin60 | ||
| π | π |
| S | √3 | S | ||||
P=4* | * | =2 | *√3 | |||
| π | 2 | π |
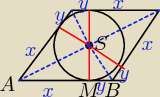 z tr.AMS
ctg30=xr
x=r*ctg30=r√3
z tr.BMS
ctg60=yr
y=r*ctg60=U{r√3{3}}
z tr.AMS
ctg30=xr
x=r*ctg30=r√3
z tr.BMS
ctg60=yr
y=r*ctg60=U{r√3{3}}
| r√3 | 4r√3 | |||
a=x+y = r√3+ | = | |||
| 3 | 3 |
| 4r√3 | 8r2√3 | |||
P= | *2r= | |||
| 3 | 3 |
| S | ||
r2= | ||
| π |
| 8S√3 | ||
P= | ||
| 3π |
| S | ||
r2= | ||
| π |
| a√3 | ||
h= | ||
| 2 |
| a√3 | ||
2r= | ||
| 2 |
| a√3 | ||
r= | ||
| 4 |
| 3a2 | ||
r2= | ||
| 16 |
| 3a2 | S | |||
= | ||||
| 16 | π |
| 16S | ||
a2= | ||
| 3π |
| 16S | √3 | |||
P= a2*sin60o = | * | |||
| 3π | 2 |
| 8S√3 | ||
P= | ||
| 3π |

| 2r | ||
a= | ||
| sin60 |
| 2 | 4r | 4√3r | ||||
a=2r* | = | = | ||||
| √3 | √3 | 3 |
| 8r2√3 | ||
P= | ||
| 3 |
| S | ||
r2= | ||
| π |
| 8S√3 | ||
P= | ||
| 3π |