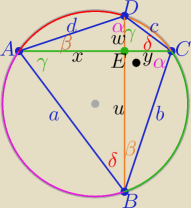
 x2+u2=a2 i a2=4R2*sin2α oraz sin2α= cos2β
u2+y2=b2 i b2=4R2*sin2γ sin2γ= cos2δ
y2+w2=c2 i c2=4R2*sin2β
w2+x2=d2 i d2=4R2*sin2δ
+ −−−−−−−
2(x2+y2+w2+u2)= 4R2(cos2β+cos2δ+sin2β+sin2δ)=4R2
x2+y2+w2+u2= 2R2
================
Popraw zapis w tezie zamiast 4R2 ma być 2R2
x2+u2=a2 i a2=4R2*sin2α oraz sin2α= cos2β
u2+y2=b2 i b2=4R2*sin2γ sin2γ= cos2δ
y2+w2=c2 i c2=4R2*sin2β
w2+x2=d2 i d2=4R2*sin2δ
+ −−−−−−−
2(x2+y2+w2+u2)= 4R2(cos2β+cos2δ+sin2β+sin2δ)=4R2
x2+y2+w2+u2= 2R2
================
Popraw zapis w tezie zamiast 4R2 ma być 2R2