dowod z trojkatem
tobiaszek: | | sinα+sinβ | |
Udowodnic ze jesli dla katow α,β,γ trojkata zachodzi zwiazek sinγ= |
| to |
| | cosα+cosβ | |
trojkat jest prostokatny.
Czy ktos pomoze?
18 lut 18:55
chichi:
cos(α)+cos(β)≠0 ...
sin(γ)=sin[180
o−(α+β)]=sin(α+β)
| sin(α)+sin(β) | | | |
| = |
| |
| cos(α)+cos(β) | | | |
| | α+β | | α+β | |
| −2sin( |
| )cos( |
| )=0 |
| | 2 | | 2 | |
| | α+β | | 1 | | α+β | |
sin( |
| )[ |
| −2cos( |
| )]=0 |
| | 2 | | | | 2 | |
| | α+β | | α+β | |
(1) sin( |
| )=0 ⇔ |
| =π ⇒ α+β=2π sprzeczne! |
| | 2 | | 2 | |
| | α+β | | 1 | | α+β | | √2 | | α+β | | π | |
cos2( |
| )= |
| ⇒ cos( |
| )= |
| ⇒ ( |
| )= |
| ⇒ α+β=π |
| | 2 | | 2 | | 2 | | 2 | | 2 | | 2 | |
Q.E.D.
18 lut 19:27
chichi:
Poprawka, się rozpędziłem...

18 lut 19:29
Mila:
γ=180−(α+β)
sin(180−(α+β))=sin(α+β)
| | sinα+sinβ | |
sin(α+β)= |
| |
| | cosα+cosβ | |
| | α+β | | α+β | | α+β | |
2sin |
| *cos2 |
| =sin |
| ⇔ |
| | 2 | | 2 | | 2 | |
| | α+β | | α+β | | α+β | |
2sin |
| *cos2 |
| −sin |
| =0 |
| | 2 | | 2 | | 2 | |
| | α+β | | α+β | |
sin |
| *(2cos2 |
| −1)=0⇔ |
| | 2 | | 2 | |
| | α+β | | 1 | | α+β | | √2 | |
cos2 |
| = |
| to cos |
| = |
| ⇔ |
| | 2 | | 2 | | 2 | | 2 | |
α+β=90
o
============
18 lut 19:31
Filip:
| | α + β | | α + β | | α + β | |
2sin |
| cos2 |
| − sin |
| = 0 |
| | 2 | | 2 | | 2 | |
| | α + β | | α + β | |
sin |
| (2cos2 |
| − 1) = 0 |
| | 2 | | 2 | |
18 lut 19:33
chichi:
Cześć @
Filip, cześć @
Mila jak leci?

18 lut 19:35
tobiaszek: Dziekuje wam bardzo zapomnialem z tymi wzorami redukcyjnymi. A mam jeszcze pytanie do takiego
dowodu ze jak pewna liczba naturalna przy dzieleniu przez 11 daje reszte 5 to kwadrat tej
liczby przy dzieleniu przez 11 daje reszte 3 i mam to zrobic za pomoca mod 11, to jakby to
bylo?
18 lut 19:41
chichi:
a ≡ b (mod n) ⇒ a2 ≡ b2 (mod n)
18 lut 20:03
Mila:
chichi− Dobrze jest, oby tak dalej było

18 lut 20:08
chichi:
@
Mila to super, oby było jeszcze lepiej
18 lut 20:16
Saizou :
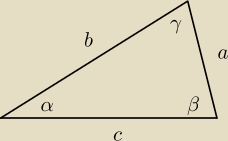
| a | | a | |
| = 2R → sinα = |
| analogicznie |
| sinα | | 2R | |
| | b2+c2−a2 | |
a2 = b2 + c2 − 2bccosα → cos α = |
| |
| | 2bc | |
| c | | | |
| = |
| |
| 2R | | | b2+c2−a2 | | a2+c2−b2 | |
| + |
| | | 2bc | | 2ac | |
| |
| | b2+c2−a2 | | a2+c2−b2 | |
c( |
| + |
| ) = a+b |
| | 2bc | | 2ac | |
a(b
2+c
2−a
2)+b(a
2+c
2−b
2) = 2ab(a+b)
ab
2+ac
2−a
3 + a
2b+bc
2−b
3 = 2a
2b+2ab
2
−ab
2+ac
2−a
3 − a
2b+bc
2−b
3 = 0
−ab(b+a)+c
2(a+b)−(a+b)(a
2−ab+b
2) = 0
−ab+c
2−(a
2−ab+b
2) = 0
a
2+b
2 = c
2
z tw. odwrotnego do Pitagorasa mamy, że jest to trójkąt prostokątny
18 lut 20:32
circle:
Pewna liczba naturalna przy dzieleniu przez 11 daje resztę 5 to kwadrat tej
liczby przy dzieleniu przez 11 daje resztę 3
n=11k+5, k∊N
n2=121k2+110k+25=121k2+110k+22+3=11*(11k2+10k+2)+3=11m+3
gdzie m=*(11k2+10k+2)∊N
19 lut 18:03
chichi:
x ≡ 5 (mod 11) ⇒ x2 ≡ 25 (mod 11) ≡ 3 (mod 11) Q.E.D.
19 lut 18:50