jakobian
salamandra: Wyznacz jakobian funkcji
a) f(x,y)=(xsiny, xcosy)
Jf(x)−> = | siny x*cos y |
| cosy x*siny |
b) f(x,y,z)=(xlny, xyz, x
z)
| yz xz xy |
| x
z−1 0 lnx*x
z |
Czy to jest dobrze? Nie wiedziałem jak na forum inaczej oznaczyć tę macierz (to wszystko jest w
jednej macierzy)
13 gru 16:15
Saizou :
f(x,y) = (xsiny, xcosy)
f
1(x,y) = xsiny
f
2(x,y) = xcosy
Tworzymy macierz Jacobiego (dla funkcji f: R
2 → R
2)
| (df1/dx) (df1/dy) | | | (df2/dx) (df2/dy) | |
| |
|
| |
Wyznacznik tej macierzy nazywamy jakobianem.
13 gru 16:34
salamandra: Teorie znam, ale nie wiem, czy dobrze to zrobiłem
13 gru 16:38
Saizou :
| df1 | | df1 | |
| = siny |
| = xcosy |
| dx | | dy | |
| df2 | | df2 | |
| = cosy |
| = −xsiny |
| dx | | dy | |
| | | |
det | = −xins2y − xcos2y = −x(sinx2y+cos2y)= −x |
| | |
13 gru 16:43
salamandra: Tak, o minusie zapomniałem jednym. A już stricte w tej macierzy, jak się z niej "wychodzi"? Tak
jak zrobiłeś w ostatniej linijce? Akurat tego nie miałem podane nigdzie
13 gru 16:44
Saizou :
Po prostu obliczyłem wyznacznik tej macierzy

zobacz na początek, że napisałem że liczę wyznacznik
13 gru 17:01
salamandra: Nie miałem wyznaczania wyznaczników podanych, więc nie wiedziałem, skąd to wziąłeś
13 gru 17:26
Saizou :
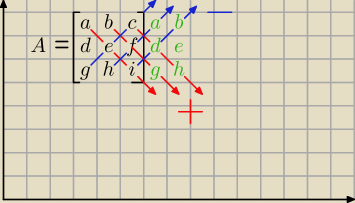
dla macierzy 3x3 zastosuj metodę Sarrusa
Dopisuję dwie kolumny z prawej strony (pierwszą i druga),
następnie mnożę wzdłuż przekątnych. Czerwone przekątne dodaje, niebieskie odejmuję.
det A = aei + bfg + cdh − gec − hfa − idb
Wyznacznik oznaczamy jako det A lub |A|
13 gru 17:51
salamandra: dzięki
13 gru 18:17



