Stereometria - optymalizacja
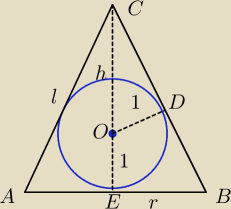
BoosterXS: W stożek wpisana jest kula o promieniu 1.
Dla jakiej długości promienia podstawy tworząca tego stożka będzie najkrótsza?
Stosuję oznaczenia, R−promień kuli, r−promień podstawy stożka, h−wysokość stożka, l−tworząca
stożka, p − połowa obwodu trójkąta będącego przekrojem osiowym stożka.
Po przyrównaniu 2 wzorów na pole trójkąta(będącego przekrojem stożka) i podstawieniu R=1
otrzymuję:
z tw. Pitagorasa otrzymuję h
2+r
2=l
2 za h mogę podstawić to otrzymane z równania wyżej, ale
wciąż mam w równaniu 2 niewiadome.
Nie wiem jak z tym dalej ruszyć, jakieś podobieństwo trójkątów wewnątrz stożka i kuli? Zechce
ktoś naprowadzić?
6 lut 21:33
ite:
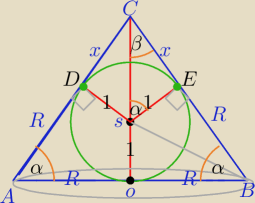
ΔCEB∼ΔCDO
stąd mamy układ równań
oraz |CB|
2=|CE|
2+|EB|
2
6 lut 22:17
ite: Nie korzystam z tej połowy obwodu trójkąta będącego przekrojem osiowym stożka.
6 lut 22:21
jc: Na to samo wychodzi. Teraz wyznaczasz h i wstawiasz do drugiego równania.
No i się komplikuje. L spełnia równanie kwadratowe (współczynniki zależą do r).
6 lut 22:25
6 lut 22:34
jc: Minimum mamy dla r=√2+√5. Chyba jednak coś pomyliłem?
6 lut 22:42
jc: Jest jednak gorzej. Zamiast 1 wpisuję a.
(L2−r2)r2=h2r2=a2(r+L)2
(r2−a2)L2 − 2a2rL − r2(r2+a2)=0
6 lut 22:51
jc: Znów źle

6 lut 22:54
jc: Jednak wcześniej było dobrze.
6 lut 22:57
6 lut 23:01
Mila:
22:34 dobry wzór , wynik też.
6 lut 23:25
a@b:
Też tak mam

6 lut 23:30
BoosterXS: Wciąż nie złapałem skąd wzór z 22:34
| |CO| | | |CB| | | h−1 | | L | | L | |
| = |
| ⇒ |
| = |
| ⇒ h= |
| + 1 |
| |OD| | | |EB| | | 1 | | r | | r | |
Z Pitagorasa mamy: L
2=h
2 + r
2 ⇒
| | L2 | | 2L | |
L2= |
| + |
| + 1 +r2 /* r2? |
| | r2 | | r | |
L
2r
2 = L
2 + 2Lr + r
2 + r
4 no i tutaj się gubię, robię prawidłowo?
7 lut 01:18
Mila:
1)
x>0,R>1
l(R)=x+R
itd
7 lut 16:32