trójkąt prosstokątny
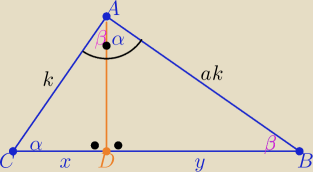
karol: W trójkącie prostokątnym ABC przyprostokątna AB jest a razy dłuższa od przyprostokątnej
AC. W jakim stosunku wysokość AD dzieli przeciwprostokątną ?
1 sty 18:07
Eta:
| | y | | x | | ak | |
wΔDBA : sinα= |
| w ΔACD : cosα= |
| i wΔABC : tgα= |
| = a |
| | ak | | k | | k | |
| | sinα | | y | | y | |
tgα= |
| ⇒ tgα= |
| i tgα=a to |
| =a ⇒ y=a2x |
| | cosα | | ax | | ax | |
| | |CD| | | x | | x | | 1 | |
zatem |
| = |
| = |
| = |
| = 1:a2 |
| | |DB| | | y | | a2x | | a2 | |
Wysokość dzieli przeciwprostokątną w stosunku 1:a
2 licząc od wierzchołka C
1 sty 18:46