| 3 | 3 | |||
x3 = −i = cos | π + isin | π | ||
| 2 | 2 |
| 3 | 3 | π | π | |||||
x0 = cos | π + isin | π = cos | + isin | π = i | ||||
| 6 | 6 | 2 | 2 |
| 7 | 7 | π | π | π | ||||||
x1 = cos | π + isin | π = cos (π + | ) + isin (π + | ) = −cos | − | |||||
| 6 | 6 | 6 | 6 | 6 |
| π | −√3 | 1 | ||||
isin | = | − | i | |||
| 6 | 2 | 2 |
| 11 | 11 | π | π | π | ||||||
x2 = cos | π + isin | π = cos (2π − | ) + isin (2π − | ) = cos | ||||||
| 6 | 6 | 6 | 6 | 6 |
| π | √3 | 1 | ||||
− isin | = | − | i | |||
| 6 | 2 | 2 |
| π | π | |||
x2 = i = cos | + isin | |||
| 2 | 2 |
| π | π | √2 | √2 | |||||
x0 = cos | + isin | = | + | i | ||||
| 4 | 4 | 2 | 2 |
| 5 | 5 | π | π | √2 | ||||||
x1 = cos | π + isin | π = cos (π+ | ) + isin (π+ | ) = − | − | |||||
| 4 | 4 | 4 | 4 | 2 |
| √2 | ||
i | ||
| 2 |
 x2 − i = 0
x2=i
x=√i
|i|=1
x2 − i = 0
x2=i
x=√i
|i|=1
| π | ||
φ= | ||
| 2 |
|
| |||||||||||||||
xk=|i|*(cos | + i sin | ) | ||||||||||||||
| 2 | 2 |
| π | π | √2 | √2 | |||||
x0=1*(cos | +i sin | )= | + | *i | ||||
| 4 | 4 | 2 | 2 |
|
| |||||||||||||||
x1=(cos | + i sin | ) = | ||||||||||||||
| 2 | 2 |
| 5π | 5π | √2 | √2 | |||||
=cos | +i sin | =− | − | *i | ||||
| 4 | 4 | 2 | 2 |
| π | ||
φ = | ||
| 2 |
| 3π | ||
φ = | ||
| 2 |
| π | ||
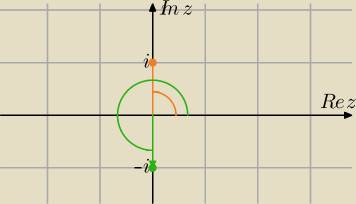
z=i to φ= | , z=i to punkt(0,1) | |
| 2 |
| 3π | ||
z=−i to φ= | , z=−i to punkt (0−1) | |
| 2 |
