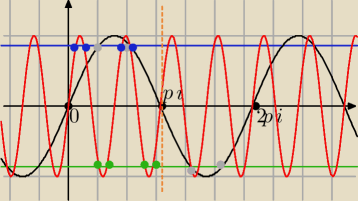
 czarny wykres y=sin(x)
czerwony wykres y=sin(4x)
czarny wykres y=sin(x)
czerwony wykres y=sin(4x)
| 2 | 3 | ||
=1− | |||
| 1+4sin2(4x) | 3+4sin2(4x) |
| 1 | ||
sin2(4x)≠− | zawsze | |
| 4 |
| 3 | ||
sin2(4x)≠− | zawsze | |
| 4 |
| 2 | 3+4sin2(4x)−3 | ||
= | |||
| 1+4sin2(4x) | 3+4sin2(4x) |
| 2 | 4sin2(4x) | ||
= | |||
| 1+4sin2(4x) | 3+4sin2(4x) |
| 4−20 | 1 | |||
t1= | =− | odpada | ||
| 32 | 2 |
| 24 | 3 | |||
t2= | = | dobry jest | ||
| 32 | 4 |
| 3 | ||
sin2(4x)= | ||
| 4 |
| √3 | √3 | |||
1) sin(4x)= | lub 2)sin(4x)=− | |||
| 2 | 2 |
| π | ||
A) sin(4x)=sin | ||
| 3 |
| π | ||
4x= | +2kπ k∊C | |
| 3 |
| π | kπ | |||
x= | + | |||
| 12 | 2 |
| π | ||
Dla k=0 x= | ∊[0,π] | |
| 12 |
| π | π | 7π | ||||
Dla k=1 x= | + | = | ∊[0,π] | |||
| 12 | 2 | 12 |
| 2π | ||
B)sin(4x)=sin | ||
| 3 |
| 2π | ||
4x= | +2kπ k∊C | |
| 3 |
| π | kπ | |||
x= | + | |||
| 6 | 2 |
| π | ||
dla k=0 x= | ∊[0,π] | |
| 6 |
| π | π | 2π | ||||
dla k=1 x= | + | = | ||||
| 6 | 2 | 3 |
| √3 | ||
2) sin(4x)=− | ||
| 2 |
| 4π | ||
C) sin(4x)=sin( | ||
| 3 |
| 4π | ||
4x= | +2kπ k∊C | |
| 3 |
| π | kπ | |||
x= | + | |||
| 3 | 2 |
| π | ||
dla k=0 x= | ∊[0,π] | |
| 3 |
| 5π | ||
dla k=1 x= | ||
| 6 |
| 11π | ||
D) sin(4x)=sin | ||
| 6 |
| 11π | ||
4x= | +2kπ i k∊C | |
| 6 |
| 11π | kπ | |||
x= | + | |||
| 24 | 2 |
| 11π | ||
dla k=0 x= | ∊[0,π] | |
| 24 |
| 23π | ||
dla k=1 x= | ∊[0,π] | |
| 24 |
| π | π | π | 11π | 7π | 2π | 5π | 23π | |||||||||
Odp x∊{ | , | , | , | , | , | , | , | } | ||||||||
| 12 | 6 | 3 | 24 | 12 | 3 | 6 | 24 |