| 1 | ||
cosα= | ||
| 2 |
| −1 | ||
sinα= | ||
| 2 |

| 1 | ||
sinα= | ||
| √2 |
| −1 | ||
cosα= | ||
| √2 |
| 1 | √2 | |||
cos α = | = | |||
| √2 | 2 |
| −1 | √2 | |||
sin α = | = − | |||
| √2 | 2 |
| π | ||
więc α = − 45o = − | ||
| 4 |
| π | π | |||
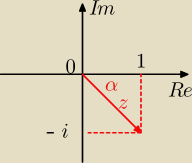
z = I z I*( cos α + i sin α) = √2*( cos (− | ) + i sin ( − | ) ) = | ||
| 4 | 4 |
| π | π | |||
= √2*( cos | − i sin | ) | ||
| 4 | 4 |
| π | ||
No tak tylko nie rozumiem co się dzieje z tym − | przy sin i cos, dlaczego minus wyłączamy | |
| 4 |
| π | π | |||
przed sin i dlaczego przy cos nagle z − | staje się | |||
| 4 | 4 |
 ostatnie pytanko mam do Ciebie mam przykład, gdzie
z=1−√3i
ostatnie pytanko mam do Ciebie mam przykład, gdzie
z=1−√3i
| 1 | ||
cosα= | ||
| 2 |
| −√3 | ||
sinα= | ||
| 2 |
 ?
?
| −π | π | |||
Mam takie pytanko do tego dlaczego akurat wybieramy ujemny kąt czyli | a nie | |||
| 4 | 4 |
| π | 7π | |||
φ=2π− | = | |||
| 4 | 4 |
| 7π | √2 | |||
sin( | )=− | |||
| 4 | 2 |
| 7π | √2 | |||
cos( | )= | |||
| 4 | 2 |
| 7π | 7π | |||
z=√2*(cos( | )+i sin( | ) | ||
| 4 | 4 |
| 1 | ||
cosφ= | ||
| 2 |
| −√3 | ||
sinφ= | ||
| 2 |
| π | 5π | |||
φ=2π− | = | |||
| 3 | 3 |
| 5π | 5π | |||
z=2*(cos( | )+i sin( | )) | ||
| 3 | 3 |