
| 2√x2+4 | ||
− | ||
| x |
| |||||||||||
... = | |||||||||||
|
| x | ||
arctg( | ) = t | |
| 2 |
| x | |
= tg(t) | |
| 2 |
| 2 | ||
dx = | dt | |
| cos2t |
| 2cos(t) | 2cos(t) | |||
... = ∫ | dt = ∫ | dt | ||
| tg2(t) * cos2(t) | sin2(t) |
| 2du | 2 | 2 | 2 | ||||||||||||||
∫ | dt = − | + C = − | + C = − | + C | |||||||||||||
| u2 | u | sin(t) |
|
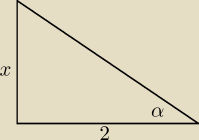
| x | x | |||
tg(α) = | ⇒ α = arctg( | ) (patrz rys) | ||
| 2 | 2 |
| x | ||
sin(α) = | ||
| √x2 + 4 |
| 2√x2 + 4 | ||
... = − | + C | |
| x |
| |||||||||||
∫ | dx | ||||||||||
|
| 1 | |||||||||||
4∫ | |||||||||||
|
| 2 | ||
4∫ | dx | |
| x2√x2+4 |
| 1 | ||
4*2∫ | dx | |
| x2√x2+4 |
| x2 | x2 | x | ||||
teraz x2+4=4( | +1) oraz oraz | = ( | ) | |||
| 4 | 4 | 2 |
| 1 | |||||||||||
4*2∫ | dx | ||||||||||
|
| x | 1 | |||
póżniej ∫f(g)(x))*g(x)dx=∫f(u)du, u=g(x) a u = | oraz du= | dx, | ||
| 2 | 2 |