obrot
zadanie: | | π | |
znajdz wzor i macierz obrotu wzgledem osi oy o kat |
| ? w R3 |
| | 2 | |
wzor obrotu wzgledem osi oy o kat α to:
x'=xcosα+zsinα
y'=y
z'=−xsinα+zcosα
dobrze?
28 lut 17:39
zadanie: moge prosic o pomoc?
28 lut 17:46
Mila:
Czekaj cierpliwie, aż Trivial tu spojrzy, ja nie pamiętam.
28 lut 17:48
MQ: | | π | |
Wzasadzie dobrze, tyle, trzeba jeszcze podstawić |
| za α i wyliczyć. |
| | 2 | |
28 lut 18:00
zadanie: a takie zadanie
znajdz wzor i macierz rzutu na plaszczyzne x+y+z=0 wzdluz wektora (−3,4,7).
28 lut 18:10
zadanie: ok dziekuje
a jeszcze dla osi ox i oz
wzor obrotu wzgledem osi ox o kat α to:
x'=x
y'=ycosα−zsinα
z'=ysinα+zcosα
wzor obrotu wzgledem osi oz o kat α to:
x'=xcosα−ysinα
y'=xsinα+ycosα
z'=z
a te wzory sa poprawnie?
28 lut 18:15
zadanie: ?
28 lut 18:37
zadanie: moge prosic o pomoc?
28 lut 18:58
Trivial:
 http://pl.wikipedia.org/wiki/Elementarne_macierze_transformacji
http://pl.wikipedia.org/wiki/Elementarne_macierze_transformacji
Nie za bardzo wiem co masz na myśli mówiąc "rzut na płaszczyznę x+y+z=0
wzdłuż
wektora (−3,4,7)". Zignoruję tę czerwoną część.
Płaszczyznę przechodzącą przez początek układu współrzędnych opisują dwa wektory liniowo
niezależne leżące na tej płaszczyźnie. Jeżeli do tego będą ortogonalne, to problem rzutowania
stanie się trywialny. Wybieramy np.:
q
1 = (1, −1, 0) q
2 = (1, 1, −2)
q
1∘q
2 = 1 − 1 + 0 = 0 ⇒ wektory ortogonalne.
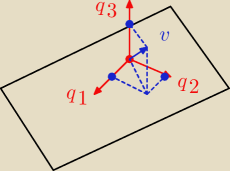
Powiedzmy, że chcemy rozłożyć dowolny wektor v na 3 wektory: q
1, q
2 i wektor q
3, który jest
prostopadły do obu wektorów: q
1, q
2. Wektory (q
1, q
2, q
3) tworzą bazę przestrzeni R
3, a
zatem za pomocą ich kombinacji można zapisać dowolny wektor.
v = c
1q
1 + c
2q
2 + c
3q
3
Biorąc obustronnie iloczyn skalarny z q
k obliczamy:
q
k∘v = c
1 q
k∘q
1 + c
2 q
k∘q
2 + c
3 q
k∘q
3
Po prawej stronie zostanie tylko jedna wartość: q
k∘q
k (pozostałe wynoszą 0), zatem:
| | qk∘v | |
qk∘v = ck qk∘qk → ck = |
| |
| | ||qk||2 | |
A teraz najlepsze. Projekcją dowolnego wektora v
v = c
1q
1 + c
2q
2 + c
3q
3
będzie po prostu część z q
1, q
2 (odrzucamy resztę − q
3).
P(v) = c
1q
1 + c
2q
2
No to teraz trzeba policzyć współczynniki c
1, c
2 dla dowolnego wektora v i gotowe.

v = (v
x,v
y,v
z)
| | q1∘v | | vx − vy | |
c1 = |
| = |
| |
| | ||q1||2 | | 2 | |
| | q2∘v | | vx + vy − 2vz | |
c2 = |
| = |
| |
| | ||q2||2 | | 6 | |
| | vx − vy | | vx + vy − 2vz | |
P(v) = |
| (1,−1,0) + |
| (1,1,−2) |
| | 2 | | 6 | |
| | 1 | |
= |
| [vx*(2,−1,−1) + vy*(−1,2,−1) + vz*(−1,−1,2)] |
| | 3 | |
Czyli macierz P wygląda tak:
2 −1 −1
P =
13 * −1 2 −1
−1 −1 2
28 lut 19:14
Trivial:
Inny sposób, który zadziała w R
3 to wycięcie części z q
3. Wektor q
3 odczytujemy z równania
płaszczyzny (jest on wektorem normalnym):
q
3 = (1,1,1).
| | 1 | |
Zauważamy, że P(v) = v − c3q3, gdzie c3 = |
| (q3∘v) |
| | 3 | |
| | 1 | |
P(v) = |
| [(3vx, 3vy, 3vz) − (vx+vy+vz)*(1,1,1)] |
| | 3 | |
| | 1 | |
= |
| [vx*(2, −1,−1) + vy*(−1,2,−1) + vz*(−1,−1,2)] |
| | 3 | |
Jak widać wychodzi to samo.
28 lut 19:25
Krzysiek: rzut na płaszczyznę x+y+z=0 wzdłuż wektora (−3,4,7)"
czyli bierzemy dowolny punkt A=(x1,y1,z1) i szukamy rzutu na płaszczyznę(ale nie rzut
prostopadły tylko równoległy do wektora v=[−3,4,7])
prosta l: (x,y,z)=A+vt
i szukamy punktu wspólnego prostej 'l' i płaszczyzny x+y+z=0
x1−3t+y1+4t+z1+7t=0
t=1/8(−x1−y1−z1)
czyli szukany rzut to punkt
A'=(x1,y1,z1)+1/8(−x1−y1−z1)[−3,4,7]=
(11/8x1+3/8y1+3/8z1,−4/8x1+4/8y1−4/8z1,−7/8x1−7/8y1+1/8z1)
a macierz tego przekształcenia (A→A') to:
11/8 3/8 3/8
−4/8 4/8 −4/8
−7/8 −7/8 1/8
28 lut 20:48
Trivial:
Dobrze, że wyjaśniłeś, Krzysiek. Nie spotkałem się dotąd z rzutem wzdłuż wektora.
28 lut 21:52
MQ: Rzuty wzdłuż wektora standardowo na polibudach liczą.
28 lut 22:16
zadanie: dziekuje za pomoc
28 lut 22:31
zadanie: moglbym jeszcze prosic o sprawdzenie z 18:15?
i w ogole o wyjasnie tego bo jezeli chodzi o te obroty to nie wiem ktora wersje wzoru wybrac bo
jest wzor na obrot o pewien kat ale tez o kat przeciwny ale kiedy jakie sie stosuje ?jak wtedy
wyglada polecenie?
28 lut 22:35
MQ: Dobrze
28 lut 22:40
zadanie: a obrot o kat przeciwny czego dotyczy?
28 lut 22:53
zadanie: Rozwazmy obrót R o kat �π wzgledem prostej wzdluz wektora [1; 1; 0].
(a) Na podstawie rysunku znajdz obrazy wersorów osiowych przez przeksztalcenie R.
(b) Korzystaj¡c z informacji, ze R jest przeksztalceniem liniowym, znajdz jego wzór oraz
macierz.
jakies podpowiedzi?
28 lut 23:16
MQ: Podpowiedzią jest punkt a)

28 lut 23:34
MQ: Jak się dobrze przyjrzysz temu obrotowi, to:
ex → ey
ey → ex
oraz
ez → −ez
28 lut 23:39
zadanie: a) R jest obrotem o kat π wzgledem prostej wzdluz wektora [1; 1; 0]
czyli tą prostą wyznacza wektor [1,1,0]
jej rownanie to:
x=t
y=t
z=0
R(1,0,0)=
R(0,1,0)=
R(0,0,1)=
jak znalezc wzor tego obrotu? bo do tej pory byly obroty ae wzgledem punktu (0,0,0).
28 lut 23:42
zadanie: no wlasnie nie umiem sobie tego wyobrazic
jak by to narysowac?
28 lut 23:44
MQ: Już ci napisałem o 23:39
28 lut 23:45
zadanie: czyli
R(1,0,0)=(0,1,0)
R(0,1,0)=(1,0,0)
R(0,0,1)=−(0,0,1)
a jak wyprowadzic ten wzor? bez rysunku?
28 lut 23:57
MQ: No przecież już masz:
0 1 0
1 0 0
0 0 −1
1 mar 00:03
zadanie: mam jeszcze pytanie
bo spotkalem sie tez z takim wzorem na obrot wzgledem osi ox
x'=x
y'=ycosα+zsinα
z'=−ysinα+zcosα
to ktory jest poprawny?
1 mar 00:21
zadanie: ?
1 mar 00:36
zadanie: ?
1 mar 10:35