
 Teraz kłania się trygonometria.
Teraz kłania się trygonometria.
| x | ||
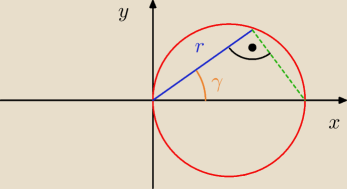
cos(γ) = | ⇒ x = rcos(γ) | |
| r |
| y | ||
sin(γ) = | ⇒ y = rsin(γ) | |
| r |

| y | x | |||
= sinα i | = cosα, | |||
| r | r |
| π | ||
współrzędnych biegunowych jest opisany jako (5, | ) lub inaczej | |
| 6 |
| π | π | |||
x=5cos | , y=5sin | . | ||
| 6 | 6 |
| 5√3 | ||
P=( | ;2,5) dzięki wielkie PW, właśnie o takie tłumaczenie mi chodziło! Tobie ZKS też | |
| 2 |