Mechanika
Jasper:
Mechanikia
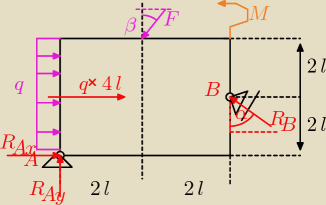
Dlaczego dla Fix=0 zapisujemy −F*sinβ−RB*sinα ? Chodzi mi konkretnie o znak, dlaczego jest on
ujemny a nie dodatni ? Nie rozumiem tylko znaków ani gdzie się daje te kąty, dlaczego ta α nie
jest z drugiej strony ?
Podpora A − stała
Podpora B − ruchoma
22 lis 23:27
Jasper: Odświeżam
22 lis 23:44
Jasper: btw. czym różnią się układy płaskie, od układów płaskich z przegubem ? Jak wygląda ten przegub?
22 lis 23:48
Jasper:
23 lis 00:08
rupert: Przy F i RB są ujemne znaki ponieważ zwroty tych sił są przeciwne do układu osi x.
23 lis 00:23
rupert: Dla rzutów na oś y F byłoby również ujemne, RB +, Ray również z +.
23 lis 00:25
Jasper: Czyli dla Fiy=0 np. bedzie RB*cosα, i − F*cosβ ?
23 lis 00:35
rupert: Dokładnie.
23 lis 00:36
rupert: Oczywiście jeszcze na oś x musisz uwzględnić q*4l oraz Rax
23 lis 00:40
Jasper: a dlaczego przy liczeniu momentu dla RiA , dokładnie w punkcie RB*cosα*4l+RB*sinα*2l ? I
tak samo przy q*4l*2l − to 2l nie wiem dlaczego jest. I tak samo w wcześniejszym dlaczego raz
przy RB mamy *4l a raz *2l ?
23 lis 00:43
rupert: Moment to siła razy ramię, czyli M=F*r. 2l,4l to jest ramię, czyli inaczej mówiąc odległość od
punktu A, bo rozumiem, że moment wyznaczasz względem punktu A. Jeśli chodzi o q to jak wiadomo
jest to obciążenie ciągłe, czyli musisz wziąć pod uwagę tutaj środek ciężkości, a że jest to
prostokąt to 4l dzielisz na pół.
23 lis 00:51
rupert: A jeśli chodzi o RB*cosα*4l+RB*sinα*2l to jak wiesz, siła działania musi byc prostopadła do
ramienia, więc trzeba siłę RB rozłożyć na dwie składowe Rbx oraz Rby, aby wszystko się
zgadzało z twierdzeniem o momencie.
23 lis 00:57